#include <sequencer.h>
Public Member Functions | |
| Sequencer (MonitorWells &) | |
| virtual | ~Sequencer () |
| void | testDynamicModule (DynamicBase &dynMod, TransportBase &transMod) |
| void | testTransport (DynamicBase &dynMod, TransportBase &transMod, double tEnd, double nOutputs) |
| void | alternateIteration (DynamicBase &dynMod, TransportBase &transMod, DiffusiveStep *pDiff, double tEnd, unsigned nDynIterations, unsigned nOutputsPerDynIt) |
| void | alternateIteration (DynamicBase &dynMod, ConservativeMethodForSystem &transMod, FlashBase &flashMod, DiffusiveStep *diff, double tEnd, double nDynIterations, double nOutputs) |
| void | alternateIterationProportionControl (CompressibleDynamic &dynMod, ConservativeMethodForSystem &transMod, FlashBase &flashMod, DiffusiveStep *diff, double tEnd, int maxTransSteps, int maxTransStepsTol, double initialDynDt, double nOutputs) |
| void | diffusiveStepTest (DiffusiveStep &diff, unsigned nIt, double tEnd, unsigned nOutputs) |
Private Attributes | |
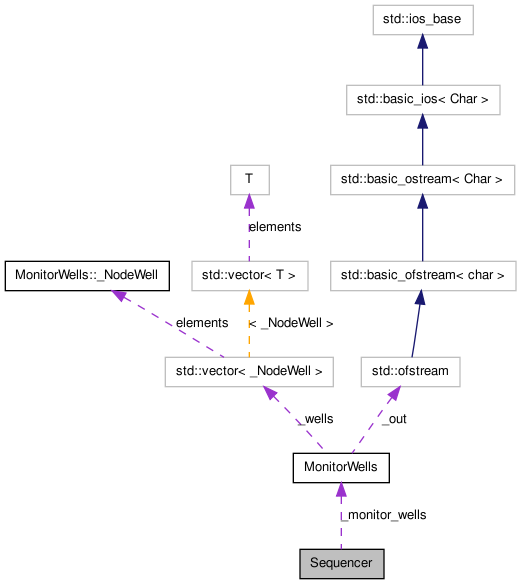
| MonitorWells & | _monitor_wells |
This class is responsible for the iteration alghorithms between the Pression module and the transport module
Definition at line 17 of file sequencer.h.
| Sequencer::Sequencer | ( | MonitorWells & | monitor_wells | ) |
Definition at line 19 of file sequencer.cpp.
00020 :_monitor_wells(monitor_wells) 00021 { 00022 }
| Sequencer::~Sequencer | ( | ) | [virtual] |
Definition at line 25 of file sequencer.cpp.
| void Sequencer::alternateIteration | ( | DynamicBase & | dynMod, | |
| ConservativeMethodForSystem & | transMod, | |||
| FlashBase & | flashMod, | |||
| DiffusiveStep * | diff, | |||
| double | tEnd, | |||
| double | nDynIterations, | |||
| double | nOutputs | |||
| ) |
Definition at line 155 of file sequencer.cpp.
00156 { 00157 double dtToPlot = tEnd/nOutputs; 00158 double dt = tEnd/nDynIterations; 00159 double t=0.0; 00160 double timeToPlot = dtToPlot; 00161 flashMod.setTransport(transMod); 00162 flashMod.setDynamic(dynMod); 00163 Timer timer(PROCESSOR_TIME); 00164 00165 00166 //Set the current time for the output classes attributes 00167 //sprintf(str,"Simulation Time %lf",t); 00168 //GnuPlotAnim::getGnuPlotAnim().setTitle(str); 00169 HDF5OrthoWriter &hdf5 = HDF5OrthoWriter::getHDF5OrthoWriter(); 00170 hdf5.setVariable("Time",0); 00171 00172 00173 00174 00175 //For each iteration of the dynamic module 00176 for (unsigned i=0;i<nDynIterations;i++) 00177 { 00178 00179 //Advances the dynamic module 00180 dynMod.iterate(transMod); 00181 //Update the other modules with the information 00182 //of the dynamic module 00183 transMod.updateVelocities(dynMod); 00184 //if (bIsCompressible) 00185 // transMod.updateBoundaryValues(dynMod,flashMod); 00186 00187 00188 //compute the default time step for 00189 //the transport. This computation usually depends 00190 //of the dynamic module data already updated for 00191 //the transport modules. 00192 double dtTrans = transMod.getDt(t,t+dt); 00193 unsigned nIt = round(dt/dtTrans); //number of iterations 00194 00195 assert( fabs(nIt*dtTrans - dt) < 1.e-10); 00196 printf("Transport Proportion %d\n",nIt); 00197 //For each iteration of the transport 00198 //do one flash calculation 00199 for (unsigned j=0;j<nIt;j++) 00200 { 00201 timer.start(); 00202 transMod.iterateN(1,dtTrans); 00203 timer.end(); 00204 00205 00206 //print Monitor well data 00207 _monitor_wells.outputData(t+dtTrans*(j+1),dynMod,transMod); 00208 00209 //printf("Transport Time: %s\n",timer.printTime().c_str()); 00210 timer.reset(); 00211 flashMod.execute(); 00212 } 00213 00214 transMod.updateDataForDynamicModule(); 00215 t+=dt; 00216 if (t >= timeToPlot) 00217 { 00218 timeToPlot+=dtToPlot; 00219 printf("Time: %g\n",t); 00220 hdf5.setVariable("Time",t); 00221 dynMod.printOutput(); 00222 transMod.printOutput(); 00223 flashMod.printOutput(); 00224 if (diff) 00225 diff->printOutput(); 00226 } 00227 if (diff) 00228 { 00229 diff->iterate(dt); 00230 flashMod.execute(); 00231 } 00232 } 00233 }
| void Sequencer::alternateIteration | ( | DynamicBase & | dynMod, | |
| TransportBase & | transMod, | |||
| DiffusiveStep * | pDiff, | |||
| double | tEnd, | |||
| unsigned | nDynIterations, | |||
| unsigned | nOutputs | |||
| ) |
This method alternates sequentially the dynamic, transport and diffusive module. The later is optional. Note that for diffusive step we pass a pointer. If such pointer is NULL the method will not run the Diffusive step. The diffusive step has the same time step as the dynamic module.
| dynMod | The dynamic module | |
| transMod | The module responsible for the transport equation | |
| pDiff | The module responsible for diffusive step | |
| tEnd | The end time of the simulation. (The time always starts at 0) | |
| nDynIterations | Number of dynamic iterations through all the simulation | |
| nOutputs | Number of time, the simulator will output data. |
Definition at line 91 of file sequencer.cpp.
00092 { 00093 00094 Timer timer(CALENDAR_TIME); //Lets measure the execution time 00095 double dt = tEnd/nDynIterations; //Get the time step of the dynamic module 00096 double dtToPlot = tEnd/nOutputs; //Defines the time step from plot to plot. 00097 double timeToPlot = dtToPlot; //When its time to plot 00098 double t=0.0; 00099 //printf("dt=%g\ndt2=%g\n",dt,dtToPlot); 00100 //Set the current time for the output classes attributes 00101 //sprintf(str,"Simulation Time %lf",t); 00102 //GnuPlotAnim::getGnuPlotAnim().setTitle(str); 00103 00104 00105 //Get the HDF5 class to print to hdf file. 00106 HDF5OrthoWriter &hdf5 = HDF5OrthoWriter::getHDF5OrthoWriter(); 00107 //Set the time to plot 00108 hdf5.setVariable("Time",0); 00109 00110 00111 00112 //Iterate the dynamic module 00113 for (unsigned i=0;i<nDynIterations;i++) 00114 { 00115 00116 timer.start(); //Start to count the time 00117 00118 dynMod.iterate(transMod); //Advance the dynamic module 00119 00120 timer.end(); //Plot the time 00121 printf("Dyn Mod Time: %s\n",timer.printTime().c_str()); 00122 00123 00124 //Now advande the transport module 00125 //First get the velocities from the dynamic module 00126 transMod.updateVelocities(dynMod); 00127 00128 timer.start(); 00129 double dtTrans = transMod.getDt(t,t+dt); 00130 unsigned nIt = round(dt/dtTrans); //number of iterations 00131 transMod.iterateN(nIt,dtTrans); 00132 timer.end(); 00133 printf("Transport Time: %s\n",timer.printTime().c_str()); 00134 printf("Transport Proportion: %u\n",nIt); 00135 if(pDiff) 00136 pDiff->iterate(dt); 00137 00138 t+=dt; 00139 00140 if (t >= timeToPlot) 00141 { 00142 hdf5.setVariable("Time",t); 00143 //Advances the dynamic module 00144 printf("Time Before plot %g\n",t); 00145 transMod.printOutput(); 00146 dynMod.printOutput(); 00147 if(pDiff) 00148 pDiff->printOutput(); 00149 timeToPlot+=dtToPlot; 00150 } 00151 } 00152 }
| void Sequencer::alternateIterationProportionControl | ( | CompressibleDynamic & | dynMod, | |
| ConservativeMethodForSystem & | transMod, | |||
| FlashBase & | flashMod, | |||
| DiffusiveStep * | diff, | |||
| double | tEnd, | |||
| int | maxTransSteps, | |||
| int | maxTransStepsTol, | |||
| double | initialDynDt, | |||
| double | nOutputs | |||
| ) |
This method do basically the same staggered alghorithm then the alternateIteration method. The only difference is that now this sequencer try to control how many transport steps we iterate per Dynamic Iteration. Note that the transport module set the time step according to the CFL condition and the former is controlled by the Dynamic Module. So we dont know how much dynamic iterations we will have through the simulation before hand. The solution is a tentative and error approach. We start with a dynamic time step (initialDynDt) and then calculate the transport time step. If the number of iterations is greater than maxTransSteps + maxTransStepsTol we rollback by recalculating the dynamic step such that we might have maxTransSteps per iteration.
| dynMod | Dynamic Module | |
| transMod | Transport Module | |
| flashMod | Flash Module | |
| tEnd | End Time | |
| maxTransSteps | Number of transport steps for each dynamic step | |
| maxTransStepsTol | Tolerance for maximum transport steps per dynamic step. | |
| initialDynDt | Initial time step to try for the Dynamic Module | |
| bIsCompressible | If the model is compressible | |
| nOutputs | Number of time the program outputs data |
Definition at line 286 of file sequencer.cpp.
00287 { 00288 double dtToPlot = tEnd/nOutputs; 00289 double t=0.0; 00290 double timeToPlot = dtToPlot; 00291 flashMod.setTransport(transMod); 00292 flashMod.setDynamic(dynMod); 00293 double dtDyn = initialDynDt; 00294 //Set the current time for the output classes attributes 00295 //sprintf(str,"Simulation Time %lf",t); 00296 //GnuPlotAnim::getGnuPlotAnim().setTitle(str); 00297 HDF5OrthoWriter &hdf5 = HDF5OrthoWriter::getHDF5OrthoWriter(); 00298 hdf5.setVariable("Time",0); 00299 int transSteps=0; 00300 double dtTrans; 00301 unsigned nTries=0; 00302 00303 00304 //For each iteration of the dynamic module 00305 while (t < tEnd) 00306 { 00307 00308 00309 while(1) 00310 { 00311 //Advances the dynamic module 00312 dynMod.setDt(dtDyn); 00313 dynMod.iterate(transMod); 00314 00315 00316 00317 //Update the other modules with the information 00318 //of the dynamic module 00319 transMod.updateVelocities(dynMod); 00320 00321 00322 00323 00324 //compute the default time step for 00325 //the transport. This computation usually depends 00326 //of the dynamic module data already updated for 00327 //the transport modules. 00328 double dtCFL = transMod.getDt(t,INFINITY); 00329 00330 00331 //Get how many transport iterations we need 00332 int nRealTransSteps = ceil(dtDyn/dtCFL); 00333 00334 00335 printf("Sequencer Alghorithm\n"); 00336 printf("\tdtDyn = %g, dtCFL = %g\n",dtDyn,dtCFL); 00337 printf("\tWe need %d transport steps",nRealTransSteps); 00338 00339 00340 00341 if (nRealTransSteps <= maxTransSteps+maxTransStepsTol) 00342 { 00343 //Ok time to iterate the transport 00344 transSteps=nRealTransSteps; 00345 dtTrans=dtDyn/transSteps; 00346 assert(dtTrans<=dtCFL); 00347 dtDyn=dtCFL*maxTransSteps; 00348 printf("\tAproved in %d tentatives\n",nTries); 00349 printf("\tdtTrans adjusted to %g\n",dtTrans); 00350 //dynMod.printOutput(); 00351 //transMod.printOutput(); 00352 //printf("\tNext dtDyn is %g\n",dtDyn); 00353 nTries=0; 00354 break; 00355 } 00356 else //rollback and calculate pressure equation again 00357 { 00358 //printf("\tNot Aproved\n"); 00359 dynMod.rollback(); 00360 dtDyn=dtCFL*maxTransSteps; 00361 //printf("\tNext dtDyn is %g\n",dtDyn); 00362 nTries++; 00363 } 00364 } 00365 00366 00367 //For each iteration of the transport 00368 //do one flash calculation 00369 for (int j=0;j<transSteps;j++) 00370 { 00371 transMod.iterateN(1,dtTrans); 00372 flashMod.execute(); 00373 t+=dtTrans; 00374 if (t >= timeToPlot) 00375 { 00376 timeToPlot+=dtToPlot; 00377 printf("Time: %g\n",t); 00378 hdf5.setVariable("Time",t); 00379 dynMod.printOutput(); 00380 transMod.printOutput(); 00381 flashMod.printOutput(); 00382 } 00383 } 00384 if (diff) 00385 { 00386 diff->iterate(dtDyn); 00387 flashMod.execute(); 00388 } 00389 transMod.updateDataForDynamicModule(); 00390 } 00391 }
| void Sequencer::diffusiveStepTest | ( | DiffusiveStep & | diff, | |
| unsigned | nIt, | |||
| double | tEnd, | |||
| unsigned | nOutputs | |||
| ) |
Definition at line 395 of file sequencer.cpp.
00396 { 00397 double dt = tEnd/nIt; 00398 double dtToPlot = tEnd/nOutputs; 00399 double timeToPlot = dtToPlot; 00400 double t=0.0; 00401 printf("dt=%g\ndt2=%g\n",dt,dtToPlot); 00402 //Set the current time for the output classes attributes 00403 //sprintf(str,"Simulation Time %lf",t); 00404 //GnuPlotAnim::getGnuPlotAnim().setTitle(str); 00405 HDF5OrthoWriter &hdf5 = HDF5OrthoWriter::getHDF5OrthoWriter(); 00406 00407 hdf5.setVariable("Time",0); 00408 00409 00410 00411 //Iterate the dynamic module 00412 for (unsigned i=0;i<nIt;i++) 00413 { 00414 diff.iterate(dt); 00415 00416 00417 t+=dt; 00418 00419 if (t >= timeToPlot) 00420 { 00421 hdf5.setVariable("Time",t); 00422 diff.printOutput(); 00423 } 00424 } 00425 00426 }
| void Sequencer::testDynamicModule | ( | DynamicBase & | dynMod, | |
| TransportBase & | transMod | |||
| ) |
Definition at line 236 of file sequencer.cpp.
00237 { 00238 //Set the current time for the output classes attributes 00239 //sprintf(str,"Simulation Time %lf",t); 00240 //GnuPlotAnim::getGnuPlotAnim().setTitle(str); 00241 HDF5OrthoWriter &hdf5 = HDF5OrthoWriter::getHDF5OrthoWriter(); 00242 hdf5.setVariable("Time",0); 00243 00244 //GnuPlotAnim &plot = GnuPlotAnim::getGnuPlotAnim(); 00245 //plot.setTitle("Time = 0"); 00246 Timer time(CALENDAR_TIME); 00247 00248 time.start(); 00249 dynMod.iterate(transMod); 00250 time.end(); 00251 printf("Time spent in the Dynamic Module: %s\n",time.printTime().c_str()); 00252 00253 00254 dynMod.printOutput(); 00255 00256 return; 00257 00258 }
| void Sequencer::testTransport | ( | DynamicBase & | dynMod, | |
| TransportBase & | transMod, | |||
| double | tEnd, | |||
| double | nOutputs | |||
| ) |
This method is used mainly to test the transport. It runs the DynamicModule just once to get a velocity field, then it iterates the transport module until the end of the simulation using this velocity field freezed in the time step 0.
| tEnd | Final time | |
| nOutputs | Number of data outputs of the transport module | |
| dynMod | Dynamic Module to be runned | |
| transMod | Transport Module to be runned |
Definition at line 40 of file sequencer.cpp.
00041 { 00042 char str[500]; 00043 double dt = tEnd/nOutputs; 00044 double t=0.0; 00045 00046 //dynMod.printOutput(); 00047 //throw new Exception("FIM"); 00048 //Advances the dynamic module 00049 dynMod.iterate(transMod); 00050 transMod.updateVelocities(dynMod); 00051 dynMod.printOutput(); 00052 00053 00054 00055 00056 //Iterate the transport 00057 for (unsigned i=0;i<nOutputs;i++) 00058 { 00059 Timer time(PROCESSOR_TIME); 00060 time.start(); 00061 double dtTrans = transMod.getDt(t,t+dt); 00062 unsigned nIt = round(dt/dtTrans); //number of iterations 00063 transMod.iterateN(nIt,dtTrans); 00064 time.end(); 00065 printf("Time spent in the transport: %s\n",time.printTime().c_str()); 00066 00067 00068 t+=dt; 00069 00070 //Set the current time for the output classes attributes 00071 sprintf(str,"Simulation Time %lf",t); 00072 HDF5OrthoWriter &hdf5 = HDF5OrthoWriter::getHDF5OrthoWriter(); 00073 00074 hdf5.setVariable("Time",t); 00075 00076 transMod.printOutput(); 00077 } 00078 }
MonitorWells& Sequencer::_monitor_wells [private] |
Definition at line 20 of file sequencer.h.
 1.6.3
1.6.3

